Robots

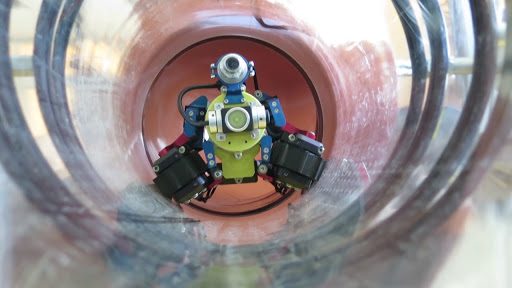
Los robots se usan generalmente para inspecciones visuales mediante operación remota. Ya hay opciones de robots en el mercado equipados con cámaras de video y sistemas de iluminación. Adicionalmente, en robots se utilizan otras tecnologías de monitorización como: ultrasonido estructural, termografía o sistemas electromagnéticos. Mediante la utilización de robots, se pueden hacer inspecciones visuales en lugares de acceso restringido como el acceso en zonas peligrosas para el inspector.

Un uso común de los robots en inspecciones visuales es el logrado mediante ruedas magnéticas. Esto permite acceder a paredes metálicas para verificar soldaduras, uniones e identificar fallos de superficies.
Beneficios del uso de robots en inspecciones visuales
Hay dos tipos de beneficios que los robots ofrecen en inspecciones visuales para mantenimiento predictivo:
- Mejora de la seguridad del inspector: se evita exponer al inspector a trabajos en espacios confinados, trabajos en alturas, trabajos cerca de áreas de riesgo eléctrico o con gases nocivos.
- Acceso a puntos de inspección de forma remota: mediante robots se puede acceder visualmente a puntos donde una persona no puede ya sea por limitaciones de espacio como por ambiente nocivo o de alto riesgo.
Aplicaciones de robots para inspecciones visuales
Entre las principales aplicaciones de robots para inspecciones visuales se tienen:
- Tanques.
- Depósitos a presión.
- Paredes de calderas.
- Tuberías.
- Torres de enfriamiento.
- Ductos.
- Paredes, fachadas.
- Estructuras debajo del agua.
Consideraciones para seleccionar un robot
Al ser una tecnología no estándar en la industria, posiblemente no se tenga experiencia seleccionando robots, ya sea para su adquisición o para contratar servicios. A continuación se detallan aspectos a considerar al seleccionar un robot para inspecciones visuales para mantenimiento predictivo.
Cree una lista de todos los activos y puntos de inspección para los cuales necesita el robot. Para cada caso defina la distancia entre el punto de inspección y el lugar de control, condiciones de trabajo (interior/exterior, sumergido, temperatura, presión).
Compruebe con su organización que el robot no se podría utilizar para algún otro fin. Muchas veces al tener un robot en el departamento de mantenimiento, se requiere compartir el robot para fines para los cuales probablemente no esté preparado, como por ejemplo: manipulación remota, levantamiento de datos en 3D, inspecciones de espesor con ultrasonido u otras inspecciones visuales en procesos.
Haga un plan de inspección del robot. Es importante saber la autonomía, alimentación eléctrica, posibilidad de atascamiento. Igualmente, establezca la periodicidad de uso (semanal, mensual, semestral o anualmente).
Defina el tipo de imágenes que quiere obtener: de tres ejes, panorámicas, de foco acotado, videos, 4K, imágenes termográficas. Esto le permitirá seleccionar la cámara y el software adecuado.
Manejo e integración de datos. Esta es la característica más olvidada a la hora de seleccionar un robot, ya que siempre las propuestas se concentran en las características técnicas del robot. Nunca se debe perder de foco que se necesita integrar la información e imágenes captadas con el robot a un repositorio de informes de mantenimiento predictivo único en la empresa.
Unos últimos consejos para seleccionar un robot:
- Determine el grado de autonomía requerido para el robot.
- Tome en cuenta las superficies sobre las cuales se desplazará el robot.
- Haga un plan piloto. Probablemente tenga que contratar servicios al inicio para ver la factibilidad del uso del robot.
- Considere el entrenamiento continuo del personal.
- Soporte técnico y stock de partes locales.
En esta página:
¿Qué es Power-MI?
Power-MI es una herramienta en la nube que le permite diseñar y gestionar su mantenimiento predictivo con todas las técnicas en una plataforma. Informes fáciles, órdenes de trabajo automáticas e integración a CMMS.
Leer más¿Te gusta esta formación?
 cloud_download¡Descarga aquí nuestra versión en formato eBook!
cloud_download¡Descarga aquí nuestra versión en formato eBook!