Técnicas de fijación del sensor a la máquina

Existe un aspecto de gran importancia relativo a la colocación de los sensores de contacto. El método de sujeción del sensor en la máquina determina directamente el corte de altas frecuencias, ya que el contacto sensor-máquina actúa como un filtro paso bajo mecánico. En la Tabla 3.2 se muestra la frecuencia límite según las distintas formas de sujeción de los sensores que aparecen en la Figura 3.8 agrupadas como temporales y permanentes.
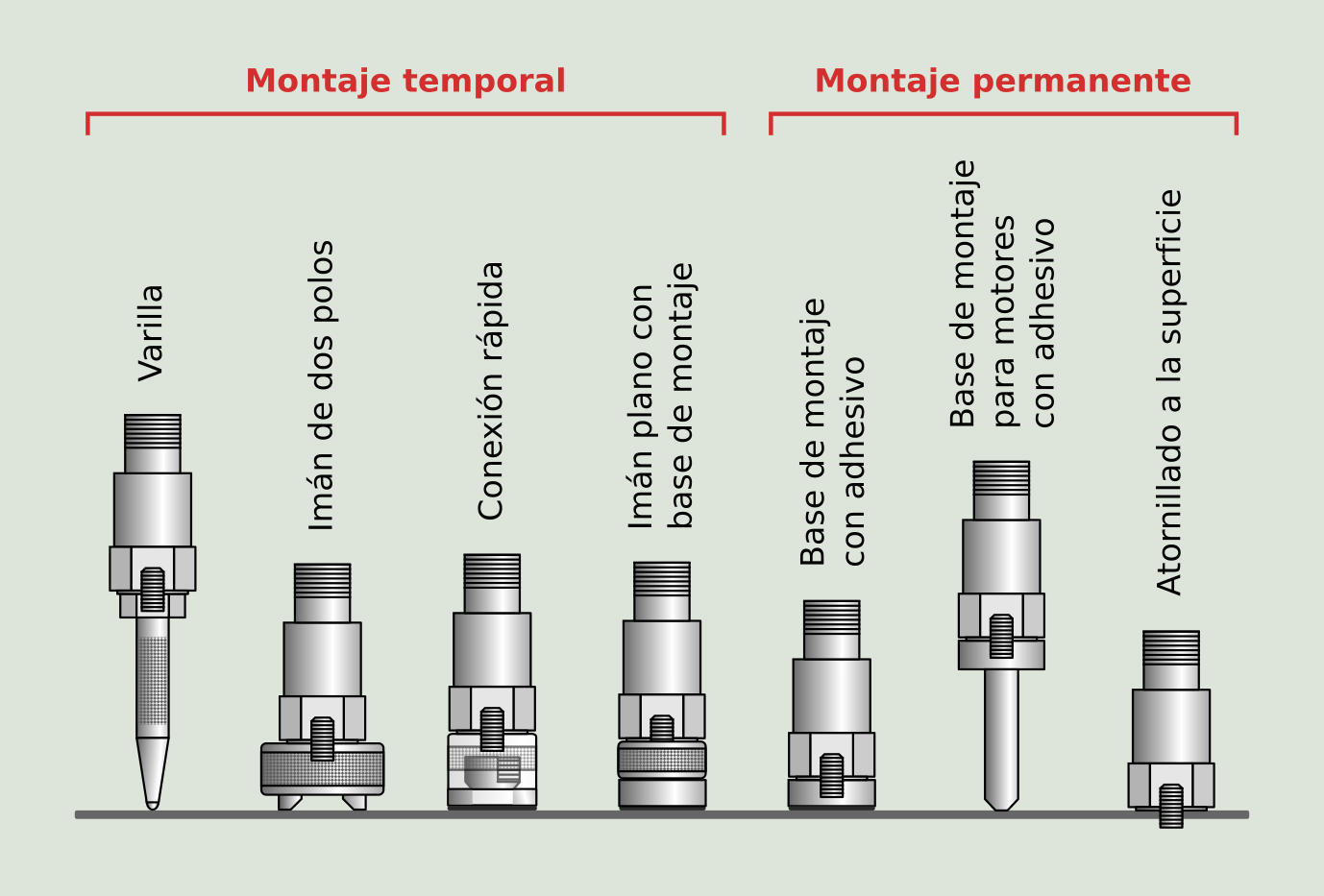
Es preferible sujetar el sensor con la mano de forma directa sobre el punto a medir a utilizar varillas de extensión que actúan como amortiguadores. El mejor método de sujeción es, evidentemente, atornillando el sensor a la superficie de la máquina donde se va a medir, aunque, por su coste, solamente se utiliza este método en sistemas de monitorización en continuo. Para capturar señales a muy alta frecuencia (de 6 a 8 kHz), se recomienda la utilización de grasas y pegamentos a base de silicona. En general, en la industria es muy difícil obtener medidas fiables de vibraciones a frecuencias por encima de 5 kHz. Los analizadores de vibraciones modernos disponen de rangos de frecuencia de medición lineales que están muy por encima de los rangos de respuesta lineales de los sensores.
| Técnica de fijación | Frecuencia máxima (Hz) |
|---|---|
| Sujeción manual | 2.000 |
| Montaje con imán | 5.000 |
| Montaje con adhesivo | 6.000 |
| Montaje atornillado | 7.000 |
En esta página:
¿Qué es Power-MI?
Power-MI es una herramienta en la nube que le permite diseñar y gestionar su mantenimiento predictivo con todas las técnicas en una plataforma. Informes fáciles, órdenes de trabajo automáticas e integración a CMMS.
Leer más¿Te gusta esta formación?
 cloud_download¡Descarga aquí nuestra versión en formato eBook!
cloud_download¡Descarga aquí nuestra versión en formato eBook!