Componentes y frecuencias de interés

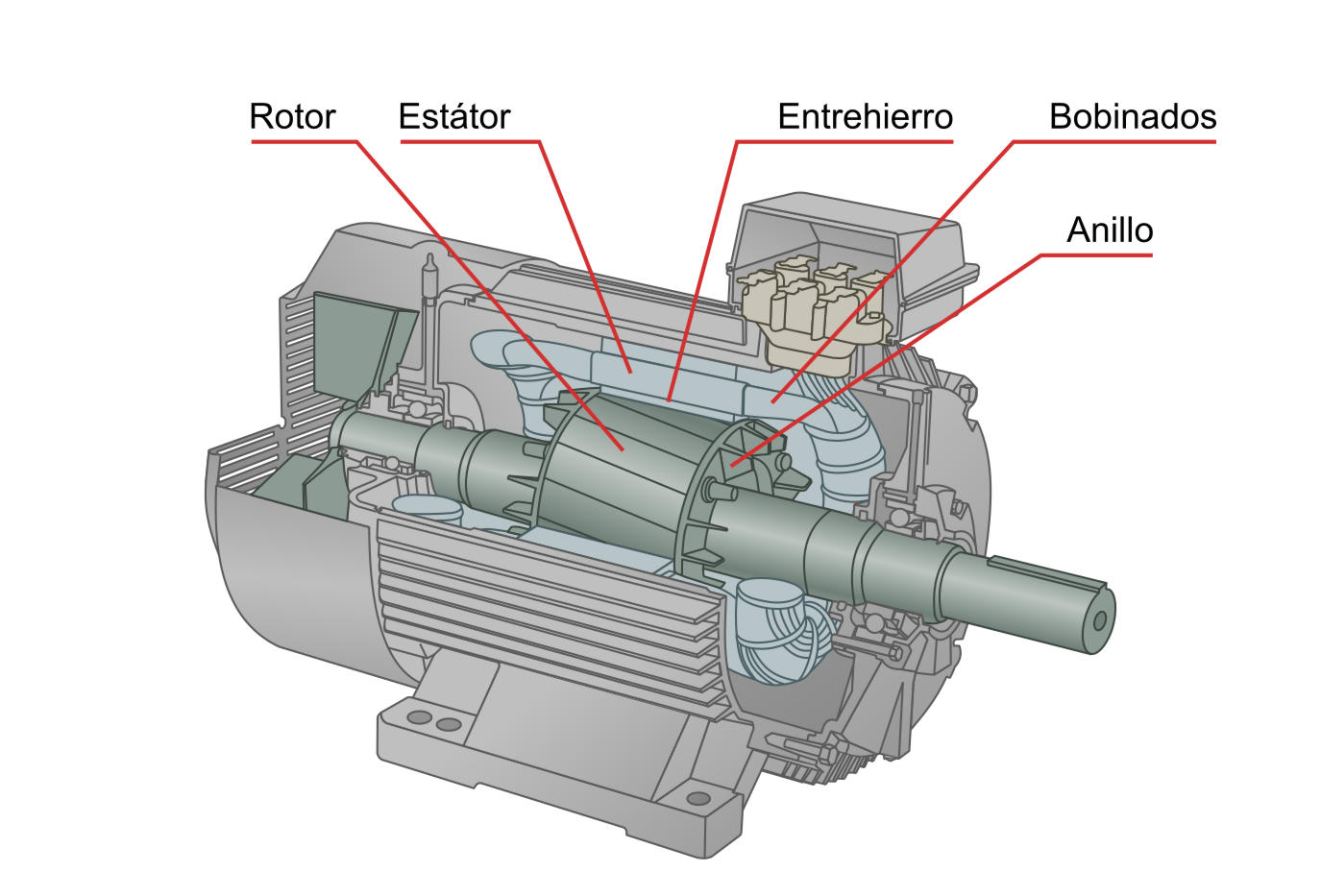
Los motores asíncronos de inducción son probablemente los más sencillos y robustos de los motores eléctricos. El rotor está constituido por varias barras conductoras dispuestas paralelamente al eje del motor y por dos anillos conductores en los extremos. El conjunto es similar a una jaula de ardilla y por eso se le denomina también motor de jaula de ardilla. El estátor consta de un conjunto de bobinas, de modo que cuando la corriente alterna trifásica las atraviesa, se forma un campo magnético rotatorio en las proximidades del estátor. Esto induce corriente en el rotor, que crea su propio campo magnético. La interacción entre ambos campos produce un par en el rotor. No existe conexión eléctrica directa entre estátor y rotor.
La frecuencia de la corriente alterna de la alimentación determina la velocidad a la cual rota el campo magnético del estátor. El rotor sigue a este campo girando más despacio, la diferencia de velocidades se denomina deslizamiento. Un deslizamiento normal ronda el 5%.
Existen ciertos parámetros y frecuencias que deben ser identificados:
- FL: Frecuencia de la red eléctrica, normalmente 50 Hz (3.000 cpm) en EEUU 60 Hz (3.600 cpm).
- 2x FL: La corriente alterna es suministrada como una senoide, en cada ciclo, cada uno de los polos del motor recibe dos veces energía, una vez con un pico positivo y otra con un pico negativo. Esto significa que la frecuencia de vibración más habitual que se produce no es la de la frecuencia de línea sino el doble de la frecuencia de línea.
- P: Número de polos del motor. El número de polos condiciona la frecuencia de giro del motor. Cuanto mayor es el número de polos, más lento es el movimiento del motor. Normalmente, el número de polos es un número par (2, 4, 6, etc.).
- NS: Velocidad síncrona. Es la velocidad de rotación del campo magnético generado y la velocidad que el rotor trata de lograr pero nunca alcanza.
`sf "N"_"S" = (sf "2" xx sf "F"_sf "L") / sf "P" xx sf "60"`
- FS: Frecuencia de deslizamiento.
`sf "F"_sf "S" = sf "N"_sf "S" - sf "RPM"`
- FP: Frecuencia de paso de polo.
`sf "F"_sf "P" = sf "P" xx sf "F"_sf "S"`
- WSPF: Frecuencia de paso de bobina (Winding Slots Pass Frequency).
`sf "WSPF" = sf "Nº de bobinas del estator" xx sf "RPM"`
- RBPF: Frecuencia de paso de barra (Rotor Bar Pass Frecuency).
`sf "RBPF" = sf "Nº de barras del rotor" xx sf "RPM"`
Lo más importante que debemos tener presente cuando se trata de vibración relacionada con problemas eléctricos es buscar amplitudes que se incrementen – no únicamente la presencia de un pico o patrones de picos. Una vez que el problema ha sido detectado mediante vibraciones, el siguiente paso debería ser incrementar la vigilancia en la amplitud para detectar una tendencia de subida o no. Además, se podría realizar algún test (pruebas de sobrevoltajes, análisis de corrientes, etc.) pero no se debería realizar ninguna acción hasta que no se conozca mejor el estado del motor. La vibración NO es la mejor manera de monitorizar la mayoría de los problemas eléctricos y este hecho debe ser reconocido.
En esta página:
¿Qué es Power-MI?
Power-MI es una herramienta en la nube que le permite diseñar y gestionar su mantenimiento predictivo con todas las técnicas en una plataforma. Informes fáciles, órdenes de trabajo automáticas e integración a CMMS.
Leer más¿Te gusta esta formación?
 cloud_download¡Descarga aquí nuestra versión en formato eBook!
cloud_download¡Descarga aquí nuestra versión en formato eBook!